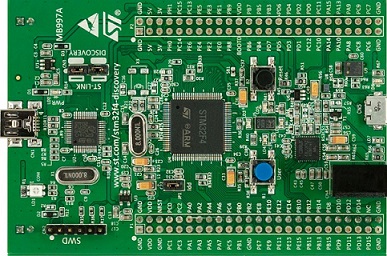
Το STM32F4G προσφέρθηκε δωρεάν στα πλαίσια του ARM University Program Lab-in-a-Box. Το STM32F4G περιέχει έναν ισχυρό επεξεργαστή arm των 32bit,στατική ram και flash μνήμη. Επίσης έχει τη δυνατότητα σύνδεσης πολλών περιφεριακών.Παρακάτω θα παραθέσουμε μερικές εφαρμογές υλοποιημένες πάνω στον stm32f4 σε συνδυασμό με την πλακέτα της flight electronics.
Παρακάτω παραθέτουμε 6 εφαρμογές που έχουν υλοποιηθεί με τον Stm32f4G και το Flight board.
Η σχεδίαση των εφαρμογών έγινε από τους φοιτητές Μούλιο Γρηγόρη, Μώκο Σωτήρη και Λιάγκο Παντελή σε συνεργασία τον Δρ. Τοπάλη Ευάγγελο.
Έλεγχος κίνησης του dc κινητήρα του FLIGHT board μέσω επιταχυνσιόμετρου.
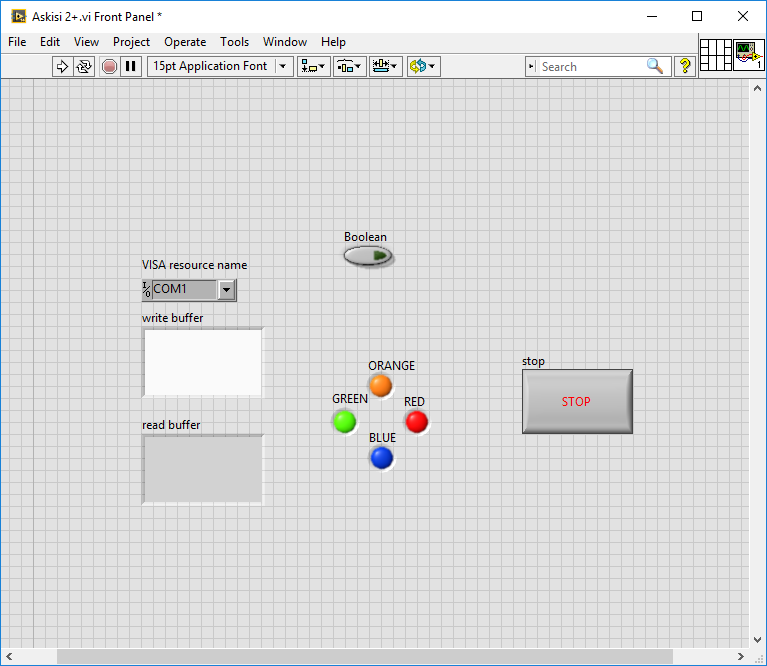
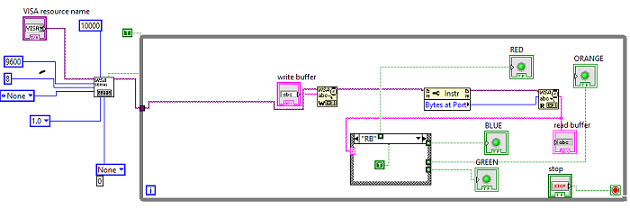
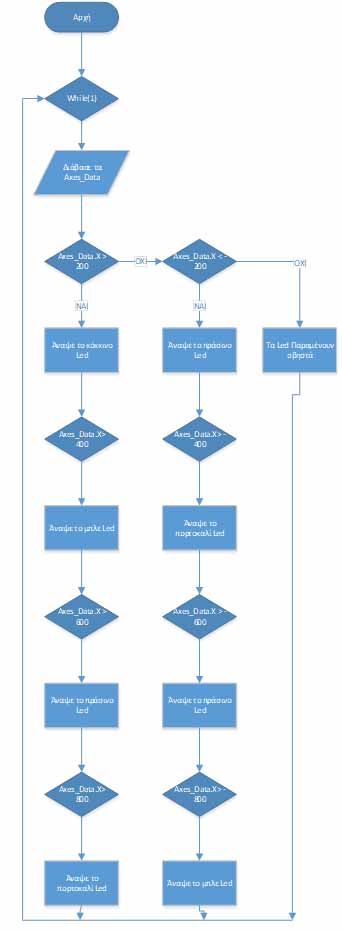
Σε αυτή την εφαρμογή θα ασχοληθούμε με τον χειρισμό του dc κινητήρα του multi-applications board της FLIGHT electronics. Για να ελέγξουμε τον κινητήρα πρέπει αρχικά να βάλουμε τον διακόπτη SW2 2 στη θέση motor. Τα υπόλοιπα δεν μας επηρεάζουν σε οποιαδήποτε κατάσταση τους. Αφού γίνει αυτό πρέπει να συνδέσουμε το board της STM στα bits 6,7 του port B του FLIGHT. Όταν δεχτεί λογικό “1” σε ένα από τα δύο bits ο κινητήρας θα εκκινήσει δεξιόστροφα αν αυτό είναι το 6ο και αριστερόστροφα αν αυτό είναι το 7ο. Συνδέουμε το 6ο bit με το κόκκινο led του STM και το 7ο με το πράσινο. Θα χρησιμοποιήσουμε το επιταχυνσιόμετρο ώστε όταν αντιληφθεί κίνηση στον χ άξονα να ανάβει ανάλογα την κίνηση το κόκκινο ή το πράσινο led. Όταν στρέψουμε την πλακέτα του STM το επιταχυνσιόμετρο θα αντιληφθεί κίνηση στον χ όταν στραφεί δεξιά με αποτέλεσμα να ανάψει το κόκκινο led και αρχίσει δεξιόστροφη κίνηση στον κινητήρα και στον χ’ όταν στραφεί αριστερά με αποτέλεσμα να ανάψει το πράσινο led και να αλλάξει η φορά περιστροφής ,από δεξιόστροφη αριστερόστροφη. Όταν η πλακέτα είναι σταθερή επιστρέφουμε στην αρχική κατάσταση.
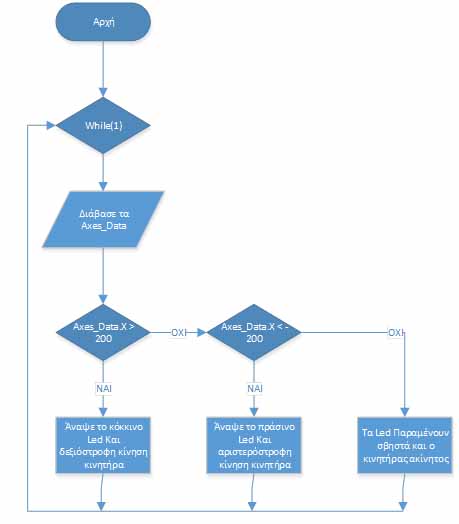
Τα flowcharts της εφαρμογής.
Ο κώδικας στην εφαρμογή του keil θα είναι ο εξής.